Synchronní elektromotor – schéma, princip činnosti, způsoby spouštění, rotory
Synchronní motor je typ elektrického stroje se stejnou frekvencí otáčení hřídele a rotujícím magnetickým polem stacionární jednotky. Vzhledem ke své poměrně složité konstrukci nejsou takové motory tak běžné jako motory asynchronní, nicméně v některých případech jsou prakticky nenahraditelné.
Zvažme konstrukci synchronních elektromotorů, jejich výhody a nevýhody.
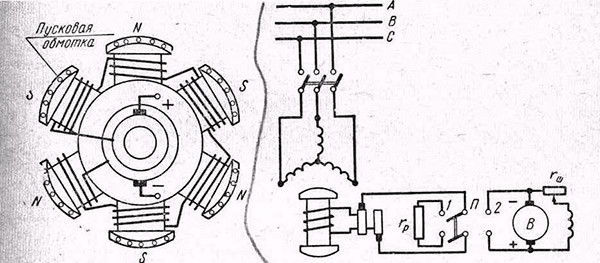
Princip činnosti
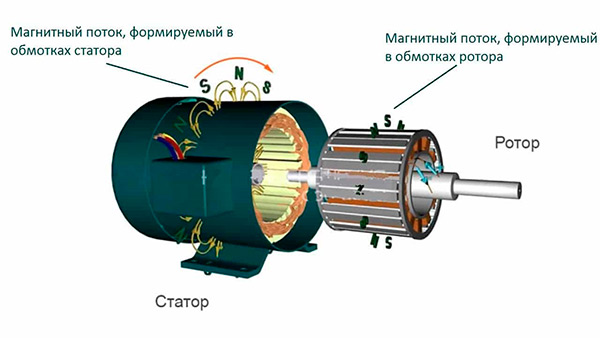
Princip činnosti synchronních elektrických strojů je založen na vazbě rotujícího magnetického pole statoru a konstantního magnetického pole rotoru.
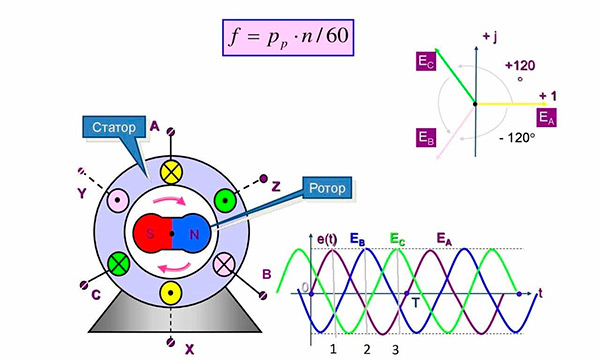
V tomto případě je koncept stejný jako u asynchronního motoru: když je na vinutí stacionární jednotky přivedeno třífázové napětí, posunuté o 1200, objeví se magnetické pole se střídavými póly.
V tomto případě je do vinutí rotoru přiváděn stejnosměrný proud, který indukuje konstantní magnetické pole.
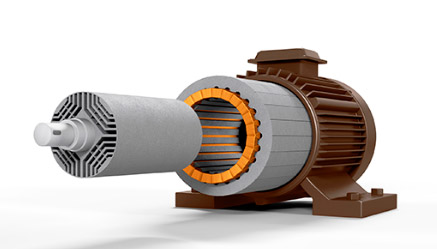
Když je do statoru dodáváno třífázové střídavé napětí a do rotoru stejnosměrný proud, budou opačné póly magnetického pole rotoru přitahovány k odpovídajícím pólům točivého pole statoru. Při této interakci vzniká krouticí moment, který otáčí hřídelí. V tomto případě bude jeho rychlost rovna frekvenci rotujícího magnetického pole indukovaného vinutími stacionární jednotky. Princip činnosti synchronních elektrických strojů je názorně znázorněn na obrázku níže.
Konstrukce a typy synchronních motorů
Synchronní motory s vinutím rotoru jsou nejběžnějšími elektrickými stroji tohoto typu. Pohonné jednotky se skládají z následujících hlavních součástí:
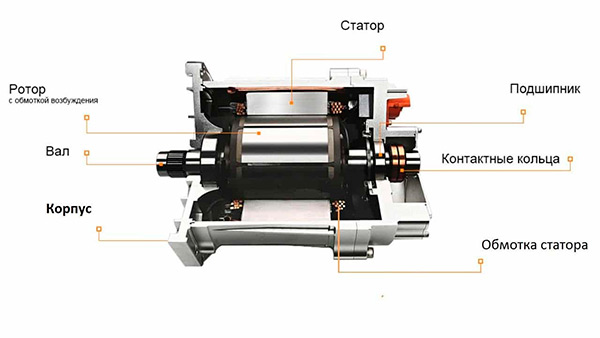
- Lůžka a kryty. Konstrukční prvky jsou navrženy tak, aby vyhovovaly dalším komponentům a podpěrám.
- Stator. Pevná část obsahuje jádro a vinutí třífázového střídavého proudu.
- Rotor. Otočná sestava se skládá z magnetického jádra s nainstalovaným DC vinutím.
- Vala. Konstrukční prvek je určen pro připojení mechanické zátěže, jsou v něm umístěny budicí cívky.
- Skluzové kroužky. Jednotky jsou navrženy tak, aby dodávaly konstantní napětí do vinutí rotoru.
Konstrukce synchronních motorů se může lišit v závislosti na typu. Například u elektrických strojů typu PMSM se k vytvoření magnetického pole používají permanentní magnety, takové elektromotory také nemají elektrické prstence. Existují rotory s vyčnívajícími a nevyčnívajícími pólovými konstrukcemi. První jmenované se používají v hnacích motorech pomaloběžných zařízení pracujících při značné zátěži.
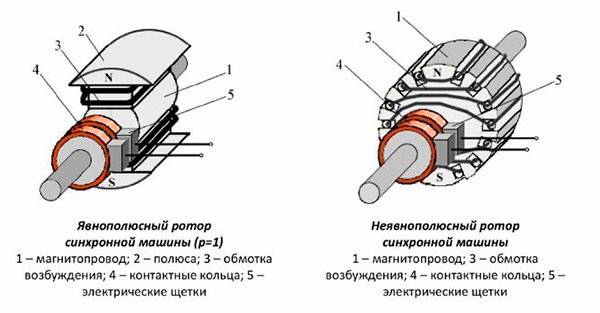
Elektromotory s nevýraznou pólovou rotační jednotkou se používají ve vysokorychlostních pohonech. Na základě konstrukce statoru se rozlišují synchronní elektrické stroje s distribuovaným (na obrázku vlevo) a soustředěným vinutím (na obrázku vpravo).

U asynchronních motorů je EMF rotující jednotky indukováno magnetickým polem statoru. V důsledku toho vzniká rozdíl mezi rychlostmi otáčení magnetického pole a rotoru, který se nazývá skluz. Synchronní elektrické stroje nemají prokluz, takže takové motory lze použít v pohonech přesných mechanismů.
Mezi výhody synchronních motorů s rotorovým vinutím dále patří vysoká přetížitelnost, zvýšená účinnost (může dosáhnout až 95 %), proporcionální závislost momentu hřídele na napájecím napětí a stabilní otáčky při proměnném zatížení. Mezi nevýhody synchronních strojů patří relativní složitost konstrukce, přítomnost zdroje stejnosměrného proudu pro budicí vinutí a složitost spouštěcího obvodu.
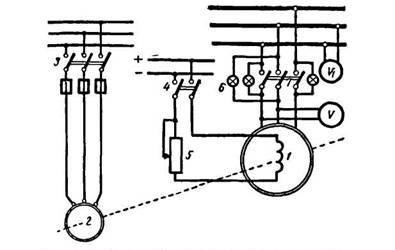
Způsoby spouštění a buzení synchronních motorů
Synchronní stroje vyžadují stejnosměrný zdroj pro napájení vinutí rotoru. Nejrozšířenější jsou systémy statického buzení na bázi tyristorových měničů. Systémy s generátorem stejnosměrného proudu na hřídeli elektromotoru se již prakticky nepoužívají.
Tyristorové budiče jsou napájeny z transformátoru připojeného ke stejné síti jako motor. Systémy umožňují regulovat napětí, účiník a hodnotu jalové složky vinutí statoru.
Synchronní elektrické stroje nelze spustit přímým připojením k síti, protože změna pólů točivého magnetického pole nastává v důsledku setrvačnosti příliš rychle, zrychlení rotoru na synchronní rychlost je nemožné.
Existuje několik schémat pro spouštění synchronních elektromotorů.
Motor. Synchronní motor se spouští zrychlením rotoru na synchronní frekvenci pomocí pomocného elektrického stroje. V tomto případě dojde k zapnutí elektromotoru po dosažení synchronní frekvence, načež se pomocný motor zastaví. Pohonné obvody jsou považovány za zastaralé pro jejich vysokou cenu a značné rozměry a hmotnost se již prakticky nepoužívají.
Asynchronní. Synchronní motory s asynchronním rozběhem mají na pólových nástavcích rotoru přídavné vinutí klece nakrátko. Elektromotor se spouští při nepřítomnosti stejnosměrného proudu v budicím vinutí jako u asynchronních elektrických strojů. Po zrychlení na rychlost blízkou synchronní je do cívky rotoru přiváděn stejnosměrný proud a motor začíná pracovat v synchronním režimu. Během startu, před vstupem do synchronismu, je vinutí rotoru uzavřeno na odpor, což je nutné pro omezení proudu indukovaného statorovým polem při rozběhu a zrychlení. Tato metoda umožňuje spustit synchronní stroj přímo ze sítě. Mezi nevýhody patří značný startovací proud a obtížný start pod zátěží.
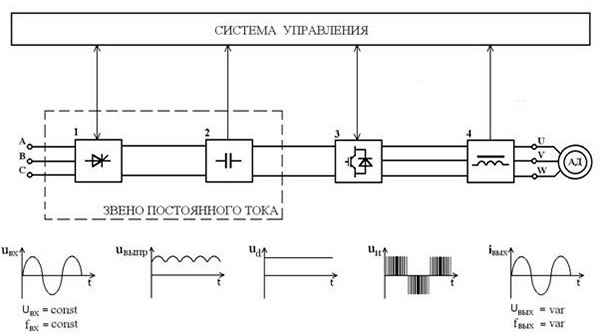
Frekvence. V tomto případě je elektromotor připojen k frekvenčnímu měniči. Elektrický stroj se spouští přivedením nízkofrekvenčního napětí a jeho postupným zvyšováním na jmenovitou hodnotu motor pracuje po celou dobu synchronně. Tato metoda umožňuje zkrátit dobu přechodových procesů a rozběhových proudů, snížit tepelné zatížení a spouštět synchronní elektrické stroje pod zátěží. Nevýhodou této metody je poměrně vysoká cena specializovaného frekvenčního měniče. Frekvenční spouštění je nejslibnější, umožňuje odstranit mnoho nedostatků synchronních elektrických strojů.

Frekvenční měniče VEDA VFD – Řada frekvenčních měničů VEDA VFD zahrnuje standardní modely určené pro širokou škálu aplikací v různých průmyslových odvětvích. Produkty VEDA VFD jsou vyvíjeny v Rusku a vyráběny v plně automatizovaných továrnách v Číně pod dohledem specialistů VEDA MC. Všechny modely frekvenčních měničů mají modulární strukturu, takže jejich funkčnost lze rozšířit použitím přídavných desek.
Typy synchronních elektromotorů
Elektrické pohonné jednotky se synchronní rychlostí otáčení se používají pro řešení pohonů pro nejrůznější účely: zařízení pro strojírenské systémy a průmysl, domácí a průmyslové mechanismy. Kromě elektrických strojů s rotorovým vinutím existuje několik dalších typů synchronních motorů. Zvažme jejich typy a design podrobněji.
Motory s permanentními magnety
Konstrukce PMSM připomíná synchronní motory s vinutím rotoru. Hlavním rozdílem je přítomnost permanentních magnetů na rotační části namísto vinutí. Motory s permanentními magnety nevyžadují stejnosměrný zdroj pro napájení budícího vinutí.
- Zjednodušená konstrukce ve srovnání se synchronním motorem s vinutím rotoru.
- Zvýšená účinnost
- Vylepšený poměr hmotnost/výkon.
- Možnost přesné regulace točivého momentu a otáček.
PMSM mají vyšší cenu, což poněkud omezuje jejich použití. Rozsah použití elektrických strojů je pro pohony středního a malého výkonu.
Synchronní reluktanční motor
Otáčení hřídele takových elektromotorů se provádí v důsledku rozdílu v magnetické vodivosti rotoru v příčné a podélné rovině. Čím více se tyto hodnoty liší, tím vyšší je točivý moment na hřídeli elektrického stroje. Konstrukce statoru reluktančních motorů se neliší od standardních synchronních elektrických strojů s distribuovaným nebo soustředěným třífázovým vinutím.
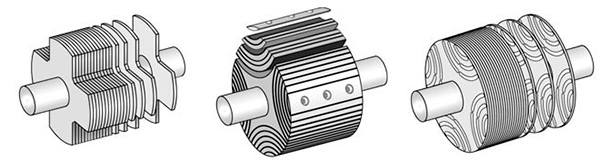
Možnosti provedení otočné části: vyčnívající póly (vlevo), axiálně laminované (uprostřed) a příčně laminované (vpravo).
Synchronní reluktanční motor má následující výhody:
- Jednoduchá konstrukce rotoru bez magnetů a vinutí.
- Mírné zahřívání.
- Nízká setrvačnost.
- Možnost nastavení rychlosti v širokém rozsahu.
Mezi nevýhody elektrických strojů patří nízký účiník. Oblastí použití těchto motorů jsou pohony zařízení a mechanismů s nízkým výkonem.
Hysterezní motor
Princip činnosti elektrických strojů s hysterezí je založen na fenoménu hystereze tvrdých magnetických materiálů. Kroutící moment vzniká vlivem zbytkové magnetizace rotoru, která je realizována magnetickým polem statoru elektromotoru, jinak je princip činnosti elektromotorů podobný jako u PMSM.
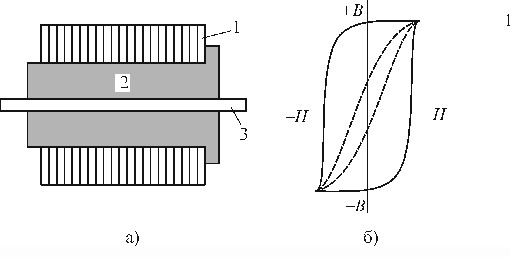
Rotační část hysterezních motorů má konstrukci nevyčnívající pólové sestavy. Mezi výhody elektrických strojů patří:
- Snadný start bez dalšího vybavení.
- Žádné vysoké startovací proudy.
- Plynulý vstup do synchronního režimu.
- Jednoduchá konstrukce.
- Vyšší účiník než synchronní reluktanční motory.
Mezi nevýhody patří vysoká cena, která je dána cenou tvrdých magnetických materiálů s širokou hysterezní smyčkou pro rotor.
Hysterezní reluktanční motor
Reluktančně-hysterezní motory jsou typem synchronních elektrických strojů s vyčnívajícím pólovým rotátorem. Startování se provádí díky točivému momentu generovanému interakcí rotujícího magnetického pole statoru a hystereze rotoru.

Další provoz motoru v synchronním režimu je způsoben jalovým momentem a zbytkovou magnetizací. Motory tak kombinují výhody reaktivních a hysterečních elektrických strojů:
- Jednoduchost designu.
- Samostartování bez dalšího vybavení.
- Možnost provozu z jednofázového napájení.
Mezi nevýhody patří nízká účinnost a cosφ. Rozsah použití motorů s reaktivní hysterezí: mikropohony pro různé účely.