Jednofázový asynchronní elektromotor
Jednofázový asynchronní elektromotor je asynchronní elektromotor, který pracuje z jednofázové střídavé elektrické sítě bez použití frekvenčního měniče a který v hlavním provozním režimu (po spuštění) využívá pouze jedno vinutí statoru (fáze).
Jednofázový asynchronní elektromotor se startovacím vinutím
Návrh jednofázového motoru s pomocným nebo rozběhovým vinutím
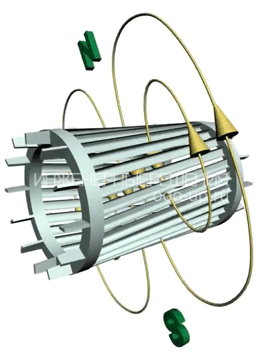
Hlavní součásti každého elektromotoru jsou rotor a stator. Rotor je rotační část elektromotoru, stator je stacionární část elektromotoru, pomocí které se vytváří magnetické pole k otáčení rotoru.

Hlavní části jednofázového motoru: rotor a stator
Stator má dvě vinutí umístěná vůči sobě pod úhlem 90°. Hlavní vinutí se nazývá hlavní (pracovní) vinutí a zabírá obvykle 2/3 drážek jádra statoru, další vinutí se nazývá pomocné (startovací) vinutí a zabírá obvykle 1/3 drážek statoru.
Motor je ve skutečnosti dvoufázový, ale protože pracuje pouze jedno vinutí, nazývá se elektromotor jednofázový.
Rotor Obvykle se jedná o zkratované vinutí, pro svou podobnost také nazývané „klec pro veverky“. Jejich měděné nebo hliníkové tyče jsou na koncích uzavřeny kroužky a prostor mezi tyčemi je nejčastěji vyplněn hliníkovou slitinou. Rotor jednofázového motoru může být rovněž vyroben ve formě dutého nemagnetického nebo dutého feromagnetického válce.

Jednofázový motor s pomocným vinutím má 2 vinutí umístěná na sebe kolmo
Princip činnosti jednofázového asynchronního motoru
Abychom lépe porozuměli činnosti jednofázového indukčního motoru, uvažujme jej pouze s jedním otočením hlavního a pomocného vinutí.

Pojďme analyzovat případ se dvěma vinutími, z nichž každé má jeden závit
Uvažujme případ, kdy v pomocném vinutí neteče žádný proud. Když je hlavní statorové vinutí připojeno k síti, střídavý proud procházející vinutím vytváří pulzující magnetické pole, stacionární v prostoru, ale měnící se od +Fmax do -Fmax.

Zastavte
Pulzující magnetické pole
Pokud umístíte rotor s počáteční rotací do pulzujícího magnetického pole, bude se dále otáčet ve stejném směru.
Abychom pochopili princip činnosti jednofázového asynchronního motoru, rozložme pulzující magnetické pole na dvě identická kruhová pole s amplitudou rovnou Фmax/2 a otáčející se v opačných směrech se stejnou frekvencí:
- kde nпр – frekvence otáčení magnetického pole v dopředném směru, ot./min.
- narr – frekvence otáčení magnetického pole v opačném směru, ot./min.
- f1 – frekvence statorového proudu, Hz,
- p – počet pólových párů,
- n1 – rychlost otáčení magnetického toku, ot./min

Zastavte
Rozklad pulzujícího magnetického toku na dva rotující
Působení pulzujícího pole na rotující rotor
Uvažujme případ, kdy rotor, umístěný v pulzujícím magnetickém toku, má počáteční rotaci. Ručně jsme například roztočili hřídel jednofázového motoru, jehož jedno vinutí je připojeno na střídavou síť. V tomto případě za určitých podmínek bude motor nadále vyvíjet točivý moment, protože uklouznutí jeho rotor vzhledem k dopřednému a zpětnému magnetickému toku bude nestejný.
Budeme předpokládat, že přímý magnetický tok Фпр, se otáčí ve směru otáčení rotoru a zpětný magnetický tok Фarr – v opačném směru. Protože otáčky rotoru n2 menší než frekvence otáčení magnetického toku n1, prokluz rotoru vzhledem k průtoku Фпр bude:
- kde sпр – prokluz rotoru vzhledem k přímému magnetickému toku,
- n2 – rychlost rotoru, otáčky za minutu,
- s – prokluz asynchronního motoru

Dopředný a zpětný rotující magnetický tok namísto pulzujícího magnetického toku
Magnetický tok Farr otáčí se proti rotoru, otáčky rotoru n2 vzhledem k tomuto průtoku je záporný a prokluz rotoru vzhledem k Фarr
- kde sarr – prokluz rotoru vůči zpětnému magnetickému toku
Zastavte
Rotující magnetické pole pronikající do rotoru

Proud indukovaný v rotoru střídavým magnetickým polem
Podle zákona elektromagnetické indukce přímý Fпр a obráceně Farr magnetické toky vytvářené statorovým vinutím indukují EMF ve vinutí rotoru, což odpovídajícím způsobem vytváří proudy I v rotoru nakrátko2pr a já2ot. V tomto případě je frekvence proudu v rotoru úměrná skluzu, proto:
- kde f2pr – aktuální frekvence I2pr indukovaný přímým magnetickým tokem, Hz
- kde f2ot – aktuální frekvence I2ot indukovaný reverzním magnetickým tokem, Hz
S rotujícím rotorem tedy elektrický proud I2ot, indukované zpětným magnetickým polem ve vinutí rotoru, má frekvenci f2ot, mnohem vyšší než frekvence f2pr proud rotoru I2prindukované přímým polem.
Příklad: pro jednofázový asynchronní motor pracující ze sítě s frekvencí f1 = 50 Hz při n1 = 1500 a n2 = 1440 otáček za minutu,
skluz rotoru vzhledem k přímému magnetickému toku sпр = 0,04;
frekvence proudu indukovaného přímým magnetickým tokem f2pr = 2 Hz;
skluz rotoru vůči zpětnému magnetickému toku sarr = 1,96;
frekvence proudu indukovaného zpětným magnetickým tokem f2ot = 98 Hz

Podle Ampérova zákona v důsledku interakce elektrického proudu I2pr s magnetickým polem Fпр dochází k točivému momentu
- kde Mпр – magnetický moment vytvořený přímým magnetickým tokem, N∙m,
- сM – konstantní koeficient určený konstrukcí motoru
Elektrický proud I2ot, interagující s magnetickým polem Фarr, vytváří brzdný moment Marrproti otáčení rotoru, tedy proti momentu Mпр:
- kde Marr – magnetický moment vytvořený zpětným magnetickým tokem, N∙m
Výsledný moment působící na rotor jednofázového asynchronního motoru je
FAQ: Vzhledem k tomu, že v rotujícím rotoru budou přímými a zpětnými magnetickými poli indukovány proudy různých frekvencí, nebudou momenty síly působící na rotor v různých směrech stejné. Rotor se tedy bude nadále otáčet v pulzujícím magnetickém poli ve směru, ve kterém se původně otáčel.
Brzdný účinek zpětného pole
Když jednofázový motor pracuje v rámci jmenovité zátěže, to znamená při malých hodnotách skluzu s = sпрtočivý moment vzniká hlavně díky momentu Mпр. Brzdný účinek momentu zpětného pole Marr – bezvýznamný. To je způsobeno tím, že frekvence f2ot mnohem vyšší než frekvence f2pr, tedy indukční svodový odpor vinutí rotoru x2ot =x2sarr proud I2ot mnohem větší než jeho aktivní odpor. Proto aktuální I2ot, který má velkou indukční složku, má silný demagnetizační účinek na zpětný magnetický tok Farr, což ji výrazně oslabuje.
- kde r2 — aktivní odpor tyčí rotoru, Ohm,
- x2ot — reaktance rotorových tyčí, Ohm.
Pokud vezmeme v úvahu, že účiník je malý, je jasné, proč Marr v režimu zatížení motoru nemá výrazný brzdný účinek na rotor jednofázového motoru.

Rotor nelze spustit pomocí jedné fáze

Rotor s počáteční rotací bude pokračovat v rotaci v poli vytvořeném jednofázovým statorem
Působení pulsujícího pole na stacionárním rotoru
Se stacionárním rotorem (č2 = 0) skluz sпр =sarr = 1 a Mпр = Marr, tedy počáteční rozběhový moment jednofázového asynchronního motoru Mп = 0. Pro vytvoření rozběhového momentu je nutné otáčet rotorem v jednom nebo druhém směru. Pak s ≠ 1 je narušena rovnost momentů Mпр jimarr a výsledný elektromagnetický moment nabývá nějaké hodnoty.
Startování jednofázového motoru. Jak vytvořit počáteční rotaci?
Jedním ze způsobů, jak vytvořit rozběhový moment v jednofázovém asynchronním motoru, je umístění pomocného (spouštěcího) vinutí B, posunutého v prostoru vzhledem k hlavnímu (pracovnímu) vinutí A pod úhlem 90 elektrických stupňů. Aby statorová vinutí vytvořila točivé magnetické pole, proudy IA a jáB ve vinutích musí být vůči sobě fázově mimo. Chcete-li získat fázový posun mezi proudy IA a jáB V obvodu pomocného (spouštěcího) vinutí B je zařazen fázově posuvný prvek, který se používá jako aktivní odpor (rezistor), indukčnost (induktor) nebo kapacita (kondenzátor) [1].
Poté, co se rotor motoru zrychlí na rychlost otáčení blízkou ustálenému stavu, startovací vinutí B se vypne. Pomocné vinutí se vypíná buď automaticky pomocí odstředivého spínače, časového relé, proudového nebo diferenciálního relé, nebo ručně pomocí tlačítka.
Při spouštění tedy motor pracuje jako dvoufázový a po dokončení rozběhu jako jednofázový.
Připojení jednofázového motoru
Se startovacím odporem
Třífázový motor – jednofázový asynchronní motor s pomocným primárním vinutím na statoru, přesazeným vůči hlavnímu vinutí, a rotorem nakrátko [2].
Jednofázový asynchronní motor s startovací odpor – motor s dělenou fází, ve kterém má obvod pomocného vinutí zvýšený aktivní odpor.

Ohmický fázový posun, bifilární způsob vinutí startovacího vinutí

Rozdílný odpor a indukčnost vinutí
Pro spuštění jednofázového motoru můžete použít spouštěcí odpor, který je zapojen do série se spouštěcím vinutím. V tomto případě je možné dosáhnout fázového posunu o 30° mezi proudy hlavního a pomocného vinutí, což je docela dost pro nastartování motoru. U motoru se startovacím odporem je fázový rozdíl vysvětlen různým komplexním odporem obvodů.
Také fázový posun lze vytvořit použitím startovacího vinutí s nižší indukčností a vyšším odporem. K tomu je spouštěcí vinutí vyrobeno s menším počtem závitů a pomocí tenčího drátu než v hlavním vinutí.
Tuzemský průmysl vyrábí řadu jednofázových asynchronních elektromotorů s aktivním odporem jako fázově posuvný prvek řady AOLB o výkonu od 18 do 600 W při synchronních otáčkách 3000 a 1500 ot./min, určených pro zapojení do sítě. s napětím 127, 220 nebo 380 V, frekvencí 50 Hz.
S kondenzátorovým startem
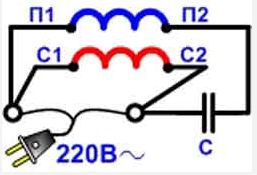
Kondenzátorový startovací motor je motor s dělenou fází, ve kterém je obvod pomocného vinutí s kondenzátorem zapnut pouze během doby startu.

Kapacitní fázový posun se startovacím kondenzátorem
Pro dosažení maximálního rozběhového momentu je nutné vytvořit kruhové točivé magnetické pole, to vyžaduje, aby proudy v hlavním a pomocném vinutí byly vůči sobě posunuty o 90°. Použití odporu nebo induktoru jako prvku fázového posunu neposkytuje požadovaný fázový posun. Pouze zahrnutí kondenzátoru určité kapacity umožňuje fázový posun o 90°.
Mezi prvky s fázovým posunem pouze kondenzátor umožňuje dosáhnout nejlepších startovacích vlastností jednofázového asynchronního elektromotoru.
Motory, v jejichž obvodu je neustále zapojen kondenzátor, využívají k provozu dvě fáze a nazývají se kondenzátorové motory. Princip činnosti těchto motorů je založen na využití točivého magnetického pole.
Jednofázový stíněný pólový motor
Stínovaný pólový motor – motor s dělenou fází, ve kterém je pomocné vinutí zkratováno.
Stator Jednofázový indukční motor se stíněným pólem má obvykle vyčnívající póly. Na vyčnívajících pólech statoru jsou navinuty cívky jednofázového budícího vinutí. Každý pól statoru je rozdělen na dvě nestejné části axiální drážkou. Menší část kůlu je překryta zkratovaným obratem. Rotor jednofázový motor se stíněnými póly – zkratovaný ve formě „veverčí“ klece.
Při připojení jednofázového statorového vinutí k síti vzniká v magnetickém obvodu motoru pulzující magnetický tok. Jedna část prochází podél nestíněné Ф’ a druhá Ф” – podél stíněné části tyče. Průtok “F” indukuje EMF E ve zkratované smyčcek, což má za následek proud Ik zaostávající za Ek mimo fázi kvůli indukčnosti závitu. Aktuální Ik vytváří magnetický tok Fk, směrovaný čítač F“, vytvářející výsledný tok ve stíněné části sloupu Fэ=F”+Fk. V motoru se tedy toky stíněné a nestíněné části pólu v čase posunou o určitý úhel.
Prostorové a časové úhly posunu mezi toky Фэ a Ф’ vytvářejí podmínky pro vznik rotujícího eliptického magnetického pole v motoru, protože Фэ ≠ F’.
Startovací a provozní vlastnosti dotyčného motoru jsou nízké. Účinnost je mnohem nižší než u kondenzátorových motorů stejného výkonu, což je spojeno se značnými elektrickými ztrátami ve zkratované cívce.
Jednofázový elektromotor s asymetrickým statorovým magnetickým obvodem

Stator Takový jednofázový motor je vyroben s výraznými póly na asymetrickém vrstveném jádru. Rotor — zkratovaný typ „klece pro veverky“.
Tento elektromotor nevyžaduje k provozu použití prvků s fázovým posunem. Nevýhodou tohoto motoru je nízká účinnost.

Jednofázové motory jsou elektrické stroje s nízkým výkonem. Magnetický obvod jednofázových motorů obsahuje dvoufázové vinutí, skládající se z hlavního vinutí a rozběhového vinutí.
K otáčení rotoru jednofázového motoru jsou zapotřebí dvě vinutí. Nejběžnější motory tohoto typu lze rozdělit do dvou skupin: jednofázové motory se startovacím vinutím a motory s provozním kondenzátorem.
U motorů prvního typu je startovací vinutí zapnuto přes kondenzátor pouze v době nastartování a poté, co motor vyvine normální otáčky, je odpojen od sítě. Motor dále pracuje s jedním pracovním vinutím. Velikost kondenzátoru je obvykle uvedena na typovém štítku motoru a závisí na jeho konstrukci.
U jednofázových asynchronních střídavých motorů s provozním kondenzátorem je pomocné vinutí trvale připojeno přes kondenzátor. Hodnota pracovní kapacity kondenzátoru je dána konstrukcí motoru.
To znamená, že pokud se spouští pomocné vinutí jednofázového motoru, dojde k jeho připojení pouze během spouštění a pokud je pomocné vinutí kondenzátor, pak k jeho připojení dojde přes kondenzátor, který zůstane zapnutý během chod motoru.
Je nutné znát konstrukci rozběhového a provozního vinutí jednofázového motoru. Startovací a pracovní vinutí jednofázových motorů se liší jak průřezem drátu, tak počtem závitů. Pracovní vinutí jednofázového motoru má vždy větší průřez vodiče, a proto bude jeho odpor menší.
Podívejte se na fotografii a jasně vidíte, že průřezy drátů jsou různé. Vinutí s menším průřezem je výchozí. Odpor vinutí můžete měřit pomocí číselníkových a digitálních testerů a také ohmmetru. Vinutí s menším odporem je pracovní.
Rýže. 1. Pracovní a spouštěcí vinutí jednofázového motoru
Zde je několik příkladů, se kterými se můžete setkat:
Pokud má motor 4 svorky, pak po nalezení konců vinutí a po měření můžete nyní snadno zjistit tyto čtyři vodiče, menší odpor pracuje, větší odpor začíná.
Vše se zapojí jednoduše, do tlustých vodičů se přivádí 220V. A jeden konec startovacího vinutí pro jednoho z dělníků. Na kterém z nich není žádný rozdíl, směr otáčení na něm nezávisí. Záleží také na tom, jak zasunete zástrčku do zásuvky. Rotace se bude měnit v závislosti na připojení startovacího vinutí, a to změnou konců startovacího vinutí.
Další příklad. To je, když má motor 3 svorky. Zde budou měření vypadat například takto – 10 ohmů, 25 ohmů, 15 ohmů. Po několika měřeních najděte hrot, ze kterého budou naměřené hodnoty spolu se dvěma dalšími 15 ohmů a 10 ohmů.
Toto bude jeden ze síťových vodičů. Hrot, který ukazuje 10 ohmů, je také síťový a třetí 15 ohm bude startovací, který je připojen k druhému síťovému přes kondenzátor.
V tomto příkladu směr otáčení nezměníte, jaký je a bude. Zde, abyste mohli změnit rotaci, se budete muset dostat do schématu vinutí.
Další příklad, kdy měření mohou ukázat 10 ohmů, 10 ohmů, 20 ohmů. Toto je také jeden z typů vinutí. Ty se dostaly na některé modely praček, a nejen to.
U těchto motorů je pracovní a spouštěcí vinutí stejné (podle konstrukce třífázových vinutí). Nezáleží na tom, jaké máte pracovní vinutí a jaké počáteční vinutí. Přes kondenzátor je připojeno i rozběhové vinutí jednofázového motoru.
Autor: L. Ryzhenkov
Redakce A. Povny
- Jak připojit žárovku na jiné napětí
- Jak rychle odstranit izolaci z kabelu nebo drátu
- Jak vypočítat prodlužovací kabel
Doufám, že vám byl tento článek užitečný. Podívejte se také na další články v kategorii Sdílení zkušeností, Elektromotory a jejich aplikace
Přihlaste se k odběru našeho kanálu na Telegram: World of Electricity
Zde můžete zanechat komentář, položit otázku a jen chatovat:
Chat na elektrická témata
Sdílejte tento článek se svými přáteli: